HUF
HUF


Menü
Kiemelt ajánlatok (10)

3 élű keményfém alumarók
AL-3E / AL-3EL - Hosszú

4 élű GM series keményfém marók
5602R304GF

BMT-s hajtott tartók
Axiális kivitelben
BMT-s hajtott tartók
Állítható kivitelben

FD series 3xD-s keményfém fúró
1534FD03C - Belső hűtéses

Élezés, bevonatolás
Rövid határidővel vállaljuk monolit szerszámok -
keményfém fúrók, marók - felújítását, élezését
és igény szerint bevonatolását.
A szerszámok szállítása történhet futárszolgálattal, kollégáink, vagy a megrendelő
által.
Bevonatolásban fő partnerünk a Balzers, de megrendelői kérés esetén más bevonat is
választható. A szerszámokat igény szerint feliratozni (lézergravírozás) is tudjuk.
Kedvenc termékkategóriáid
Kiemelt termékkategóriák
Vedd olcsóbban
Ügyeim
Később...
Pénznem
Rendezés
Szűrés
Vásárlási előzmények
Add meg a keresendő kifejezést...
Miért nem elég a hagyományos satu az 5-tengelyes megmunkáláshoz?

1. Bevezetés
Az emberiség képes több tízmillió forintos 5-tengelyes megmunkálóközpontokat vásárolni, majd rátenni egy olyan satut, amit alapvetően 3 tengelyes gépekhez terveztek. A fizika ilyenkor csendben figyel, majd később számláz ciklusidőben, CAM-munkában és néha egy elegáns szerszámütközésben.
A modern precíziós gépiparban az 5-tengelyes megmunkálásra való áttérés nem egyszerűen több tengely használatát jelenti – valójában a teljes gyártási stratégia újragondolását követeli meg. Ebben a rendszerben a befogástechnika már nem pusztán egy statikus tartozék, hanem a teljes kinematikai lánc része.
2. A technológiai váltás kényszere
A modern precíziós gépiparban az 5-tengelyes megmunkálásra való áttérés nem egyszerűen több tengely használatát jelenti. Valójában a teljes gyártási stratégia újragondolását követeli meg.
Ebben a rendszerben a befogástechnika már nem pusztán egy statikus tartozék. A befogás a teljes kinematikai lánc része, amely közvetlenül befolyásolja a szerszám hozzáférését, a stabilitást és a megmunkálási stratégiát.
A hagyományos, 3 tengelyes környezetre tervezett befogóeszközök alkalmazása 5 tengelyes gépeken gyakran éppen a technológia legnagyobb előnyét teszi tönkre: az egyetlen felfogásból történő komplett megmunkálást.
A siker kulcsa ezért két tényező optimalizálása: a szerszámhozzáférés maximalizálása és a felfogási merevség optimalizálása. Ha ezek közül bármelyik sérül, az 5 tengelyes technológia előnyei gyorsan elpárolognak.
3. A probléma: A 3 tengelyes örökség korlátai
A hagyományos gépsatukat alapvetően arra tervezték, hogy a szerszám merőlegesen, felülről közelítse meg a munkadarabot. Ez a koncepció 3 tengelyes megmunkálásnál logikus és jól működik. A stabilitás érdekében ezek a satuk általában magas felépítésűek, széles pofákkal rendelkeznek és robusztus testkialakítást kapnak.
Ami 3 tengelyen előny, az 5 tengelyen viszont komoly korlátozássá válik.
Szerkezeti lehajlás (Deflection)
Hagyományos satuknál a szorítóerő gyakran a bázistól távol, magas pofákon keresztül hat. Ez a mechanikai elrendezés a forgácsolási erők hatására lehajláshoz vezethet, amelynek következménye a méretpontosság romlása, rezgések megjelenése és a felületi minőség romlása.
Fizikai kitakarás
A satu teste és széles pofái geometriai akadályt képeznek. Míg 3 tengelyes megmunkálásnál ez gyakran kezelhető, 5 tengelyen az alkatrész billentésekor a satu könnyen „árnyékba” helyezi a munkadarab jelentős részét. Ez gyakorlatilag ellehetetlenítheti az ötoldalú megmunkálást.
Korlátozott orsó-hozzáférés
A széles és magas kialakítás miatt a szerszámgép orsója fizikailag nem tud elég közel kerülni az alkatrész oldalsó felületeihez. Ennek következménye, hogy hosszabb szerszámokat kell használni, a szerszám merevsége csökken és a rezgésre való hajlam növekszik.
4. Magyarázat: Mi változik meg 5 tengelyen?
Az 5 tengelyes megmunkálás teljesen más követelményeket támaszt a befogóeszközökkel szemben.
Többirányú szerszámközelítés
A munkadarab folyamatos billentése és forgatása miatt a szerszámnak gyakorlatilag minden irányból hozzá kell férnie az alkatrészhez. Ez csak akkor valósítható meg, ha a befogóeszköz minimális akadályt jelent a szerszám számára.
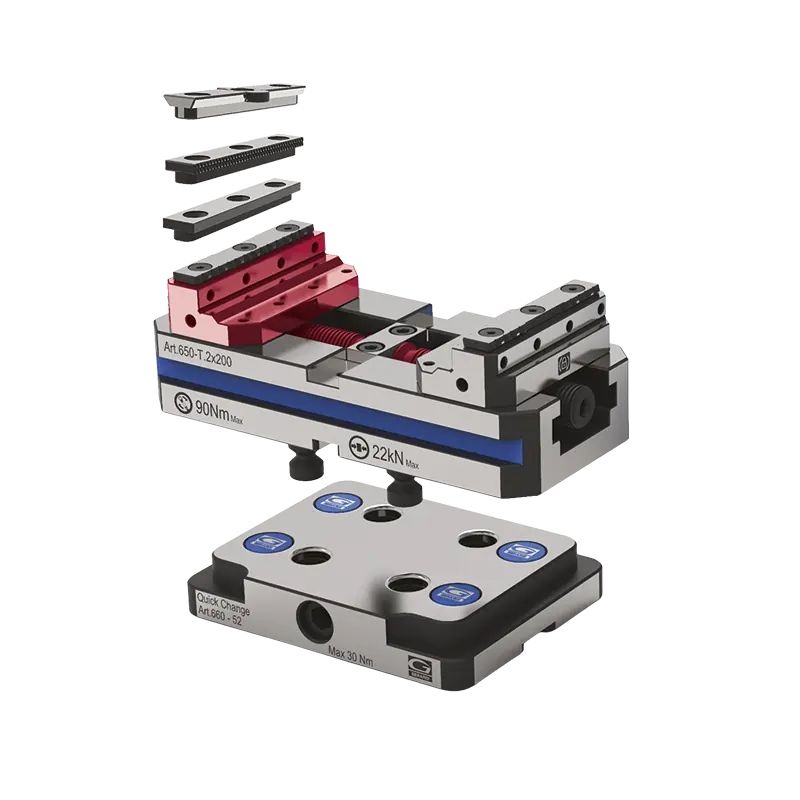
Kompakt felépítés
Az olyan rendszerek, mint a CompactGrip, kifejezetten a befogóeszköz helyigényének minimalizálására készültek. A cél az, hogy a satu ne korlátozza a szerszám mozgását az Y és Z tengely irányában sem. A kompakt kialakítás lehetővé teszi, hogy a szerszám közelebb kerüljön a munkadarabhoz, ami stabilabb megmunkálást eredményez.
GRIP technológia és ciklusidő
A fogazott betétek alkalmazásával a befogási zóna jelentősen csökkenthető. A GRIP technológia egyik fontos előnye, hogy gyakran szükségtelenné teszi az előzetes munkadarab-előkészítést (pl. fecskefarok-marást). Ennek közvetlen hatása: kevesebb előkészítő művelet, alacsonyabb szerszámköltség és rövidebb ciklusidő.
Interfész-rugalmasság
A modern 5 tengelyes satuk egyik alapkövetelménye a nullpontrendszerekkel való kompatibilitás. A Zero-Point rendszerek lehetővé teszik a befogóeszközök gyors és pontos cseréjét, ami jelentősen csökkenti az átállási időket.
5. Mikor melyiket válasszuk? (Gyakorlati útmutató)
CompactGrip – Ha a szerszám hozzáférhetősége a legnagyobb kihívás
Ha szűk helyeken kell dolgozni, a CompactGrip satu a megfelelő választás. Kifejezetten alacsony profilra és áramvonalas pofageometriára tervezték, ami finommegmunkálásnál és 5 tengelyes alkatrészeknél nyitottan tartja a vágási zónát.
FMS – Ha a leguniverzálisabb és legköltséghatékonyabb megoldást keresi
Az FMS satuk adják a legtöbb alapesetben a megfelelő hátteret. Az FMS a vízszintes és függőleges tornyok robusztus igáslova.
GripMatic – Ha automatizálni szeretne
Robotika vagy CNC gép általi vezérlés esetén egyértelműen a GripMatic a megfelelő választás. A pneumatikus vagy hidraulikus szelepeknek köszönhetően a nyitás/zárás teljesen emberi beavatkozás nélkül is megtörténhet – pl. robotkaros adagolásnál.

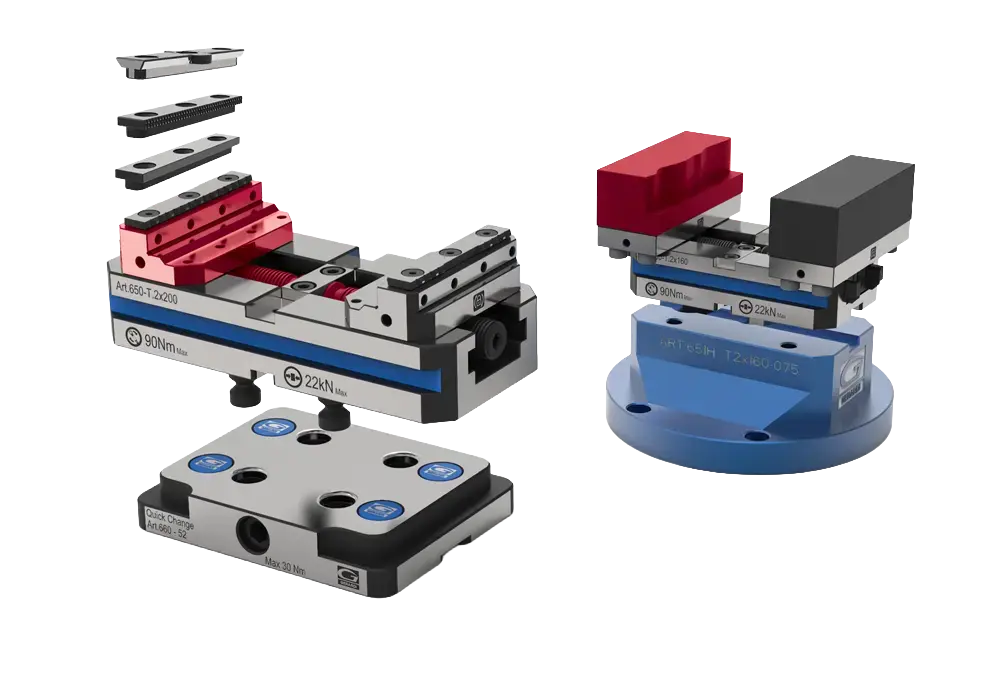
5G Vises – Ha a gépasztaltól távol, magasan kell megfogni a darabot
Ha ütközésmentesen, a gépasztaltól magasan kell rögzíteni, az 5G Vises a legjobb megoldás. Mivel a szorítóorsó magasan, az alkatrészhez nagyon közel helyezkedik el, a rendszer kiküszöböli a hosszú pofákból adódó hajlási (flexion) pontatlanságokat, és extrém magasságban is robusztus marad.

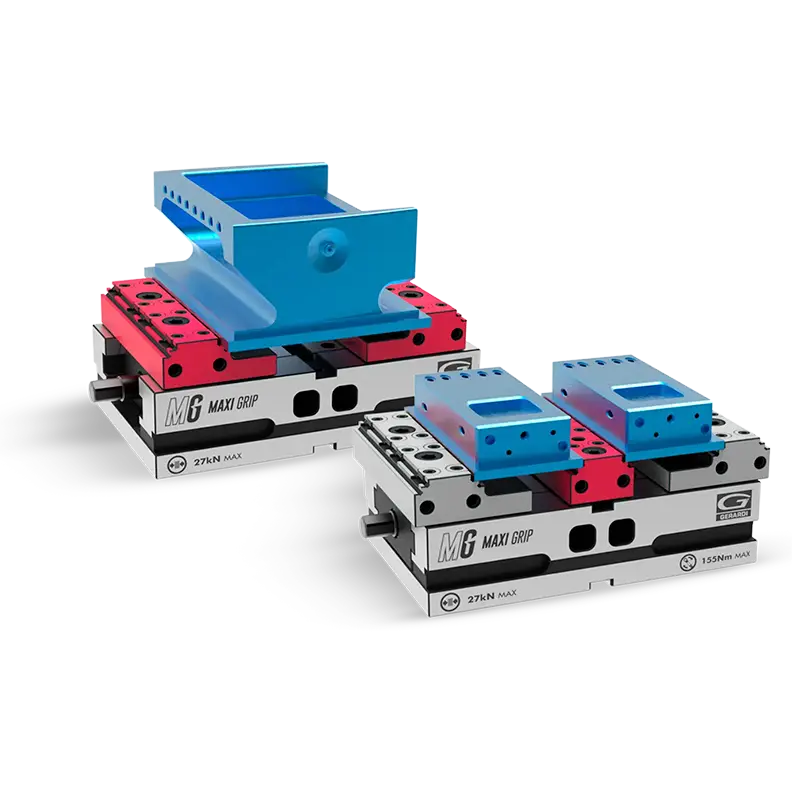
MaxiGrip – Ha egyszerre két különböző méretű munkadarabot kell befogni
A MaxiGrip satu „lebegő” (floating) rendszere lehetővé teszi, hogy két különböző méretű munkadarabot kompromisszummentesen fogjon egyszerre. Az agresszív fogazatú „Grip” lapkák maximalizálják a tartást.

Multi Grip – Ha hatalmas fémlemezekkel vagy túlméretes alkatrészekkel dolgozik
A Multi Grip moduláris blokkjaival szabadon „építhető meg” a szükséges fesztávolság – a modulok egymás mellé és mögé sorolásával akár túlméretes alkatrészek is rögzíthetők.
6. Összegzés és konklúzió
Az 5 tengelyes megmunkálás sikerét jelentős mértékben a befogástechnika határozza meg. A cél nem csupán a munkadarab rögzítése, hanem a gép teljes munkaterének és kinematikai lehetőségeinek felszabadítása.
Az olyan műszaki jellemzők, mint a ±0,02 mm-es pozícióismétlés, a belső biztonsági rugók vagy a szerkezeti merevséget növelő rögzítőkonzolok nem extra funkciók – ezek a hatékony és megbízható gyártás alapfeltételei.
A befogóeszköz helyes megválasztása határozza meg, hogy egy 5 tengelyes beruházás valóban kihasználja-e a technológia előnyeit. A megfelelő rögzítési stratégia rövidebb ciklusidőket, nagyobb pontosságot és stabilabb gyártási folyamatot eredményez.